精雕细琢高档品质,禅意荷韵品味高雅
整体解决方案
全国服务热线:

电 话:152-0118-7025(杨睿)
136-0494-6019(侯文鑫)
地 址:辽宁省大连市甘井子区
网址:www.wisdomcnc.net
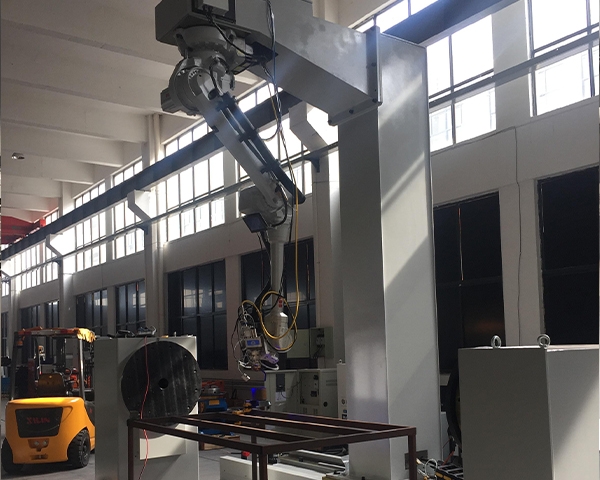
大连工作站中的焊接机器人工作站包括机器人系统、焊接电源系统、焊接变位机、轨道行走系统、焊缝自动跟踪技术、传感器、焊接工装系统、清枪器、安全保护系统等。机器人本体和辅助系统相辅相成,帮助焊接机器人提高生产效率,对焊件实现正确焊接,提高焊接质量。
焊接机器人工作站包括焊接机器人本体和其他辅助设备,辅助设备包括焊接变位机、轨道行走系统、焊缝自动跟踪技术、翻转台、安全系统等,这些辅助设备搭配焊接机器人进行工作,各辅助设备对焊接机器人有不同的用途。
焊接变位机搭配焊接机器人提高自动化。焊接机器人在自行焊接的过程中,可以对焊件的单面进行焊接,进行焊件翻转,就需要人工进行协助,焊接变位机可以将焊件移动到焊枪的位置,焊件到达焊枪的焊接范围之内有利于实现有效焊接,焊接变位机实现自动翻转,提高了焊接机器人自动化水平。
焊缝自动跟踪传感器实现对焊接过程更全面的监测。包括“焊接前”、“焊接内”、“焊接后”传感器。焊接前传感器位于焊点之前追踪焊缝和定位激光束。焊接中传感器在焊接中使用照相机或者二极管检测焊接过程,基于相机的系统分析锁眼和焊接池,采用二极管的系统能够检测加工光、热辐射或者反射激光的强度。焊接后传感器检查完成的焊点,确定焊点是否符合质量要求。传感器依靠程序化的限值来区别零件的优劣。
焊接变位机。焊接变位机作为焊接机器人的辅助设备,主要是帮助拖拽焊件到焊枪的焊接范围内,提高焊接机器人自动化水平。变位机可实现焊件的自动翻转,这样焊件的质量受人为因素的影响较小,能够增加焊接机器人的灵活性,提高焊缝的正确度。
轴类焊接机器人工作站由弧焊机器人、焊接电源、焊枪送丝机构、反转双工位变位机、工装夹具和控制系统组成。该工作站用于以转轴为基体(上置若干悬臂)的各类工件的焊接,在同一工作站内经过运用不同的夹具可完成多种类的转轴主动焊接。焊接的现对位置精度很高。因为选用双工位变位机,焊接的一起,其他工位可拆装工件,极大的提高了功率。