精雕细琢高档品质,禅意荷韵品味高雅
整体解决方案
全国服务热线:

电 话:152-0118-7025(杨睿)
136-0494-6019(侯文鑫)
地 址:辽宁省大连市甘井子区
网址:www.wisdomcnc.net
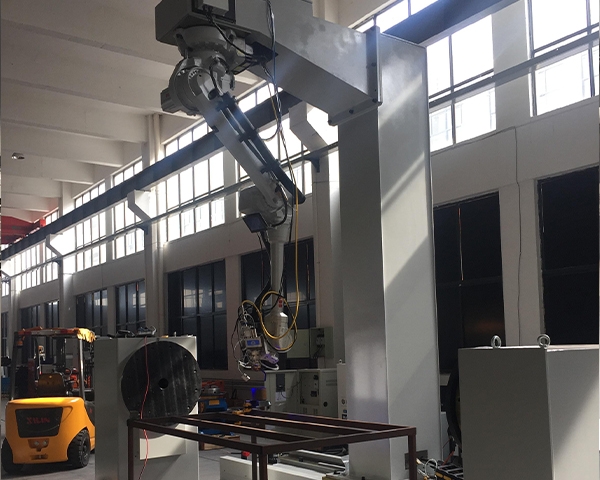
机器人焊接作为现代制造技术发展的重要标志之一,已经在我国许多工厂广泛使用,我公司动调风机叶轮的关键部位焊接主要包括组合式钢叶片的焊接及外环的焊接,两者目前均为人工手工焊接。焊接加工属于工作环境差、对人体伤害较大的加工手段,焊接人员流动性大,同时关键部位焊接对焊工水平要求较高。
焊缝自动跟踪传感器实现对焊接过程更全面的监测。包括“焊接前”、“焊接内”、“焊接后”传感器。焊接前传感器位于焊点之前追踪焊缝和定位激光束。焊接中传感器在焊接中使用照相机或者二极管检测焊接过程,基于相机的系统分析锁眼和焊接池,采用二极管的系统能够检测加工光、热辐射或者反射激光的强度。焊接后传感器检查完成的焊点,确定焊点是否符合质量要求。传感器依靠程序化的限值来区别零件的优劣。
大连工作站如何除尘
房体收集是常见的焊接机器人工作站收集方式,是使用封闭或半封闭的焊接房间在顶部或者后方连接通风管道,连接滤筒除尘器进行净化。使用过程中焊接产生的烟气粉尘在负压作用下进入通风管道后再进入滤筒除尘器,烟气粉尘被垂直安装在滤筒除尘器过滤室内的聚酯覆膜滤筒高效净化,净化后的烟气粉尘达标排放。
两套焊接夹肯分别装在外部轴滑轨上,焊接机器人布置在人操作位置的另一面,机器人地面固定 安装,焊接夹具装上制件后可预约由滑轨分别带入工作站的焊接区域焊接,两个夹具的交叉进行工作,这样就没有了制件的上下料的时间及滑轨带动夹具进出的时间,但对焊接工件的外形尺寸有一定的限制,通常焊接外形尺寸较小的零件。
焊接是工业机器人的重要应用领域,在工程机械、轨道交通、电力设备等领域应用广泛。国内焊接机器人市场目前超过 100 亿元,约占国内工业机器人总需求的三分之一。