精雕细琢高档品质,禅意荷韵品味高雅
整体解决方案
全国服务热线:

电 话:152-0118-7025(杨睿)
136-0494-6019(侯文鑫)
地 址:辽宁省大连市甘井子区
网址:www.wisdomcnc.net
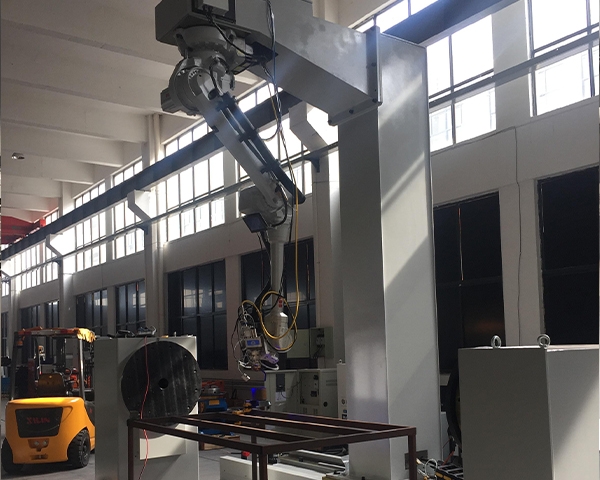
焊接机器人大连工作站包括焊接机器人本体和其他辅助设备,辅助设备包括焊接变位机、轨道行走系统、焊缝自动跟踪技术、翻转台、安全系统等,这些辅助设备搭配焊接机器人进行工作,各辅助设备对焊接机器人有不同的用途。
工业机器人可以实现的功能是根据用户的需求和周边设备来决定的,不同的工作站可以实现不同的功能。工业机器人只是整个作业系统中的一个组成部分,作业系统包括了工装、变位器以及辅助设备等周边设备,将它们进行系统集成,使之组成一个有机整体。简单来说就是工业机器人的拟人化,代替人来工作,配合周边设备就组成了工作站。
工业机器人焊接大连工作站的结构组成:
1、焊接机器人:以焊接操作机为主要构成,接受控制柜的信号,使焊抢到达焊接位置,并进行工件的焊接。
2、机器人控制柜:用来接收外部信号,如焊接、示教器、外部控制柜等,并将数据传输给焊接机器人,使机器人完成焊接任务。
3、焊接变位机:焊接变位机是焊接机器人专用焊接辅助设备,适用于回转工作的焊接变位,以得到理想的加工位置和焊接速度,辅助焊接完成,由外部控制柜控制。
4、焊枪:焊枪利用焊机的高电流,高电压产生的热量聚集在焊枪终端,融化焊丝,融化的焊丝渗透到需焊接的部位,冷却后,被焊接的物体牢固的连接成一体。
焊接机器人包含了很多高精密的部件,尤其是它的控制柜,虽然做了很好的防尘处理,但安装地点的环境太差也会减少机器人的使用寿命。为了避免环境因素对机器人造成不良影响,延长其使用寿命,尽量将焊接机器人安装在防水干燥,灰尘少的地方,并且要求控制柜和焊机尽量也与地面保持 一定距离。
焊接机器人工作站主要包括两大部分,一部分是工业机器人;另一部分是焊接设备。机器人主要包括我们熟悉的机器人本体和控制柜(包含硬件和软件部分)组成;焊接设备主要包括焊接电源(包括其控制系统)、送丝机(弧焊)、焊枪(钳)、对于智能化的焊接设备还包括传感检测系统,例如激光以及摄像传感器与控制装置等。