
精雕细琢高档品质,禅意荷韵品味高雅
整体解决方案
全国服务热线:

电 话:152-0118-7025(杨睿)
136-0494-6019(侯文鑫)
地 址:辽宁省大连市甘井子区
网址:www.wisdomcnc.net
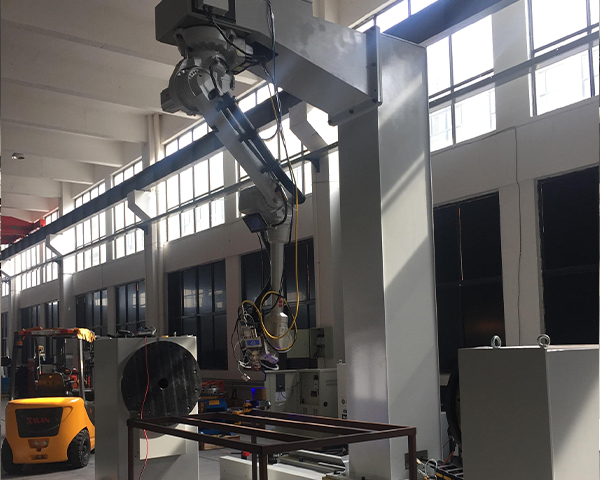
大连工作站咨询综合工件上所有焊点的位置分布情况,确定选择何种焊钳,通常有四种焊钳比较普遍,即:C型单行程焊钳、C型双行程焊钳、X型单行程焊钳、X型双行程焊钳。一个功能完善、设计合理的点焊机器人工作站需要机械工程师、电气工程师和焊接工程师的共同配合设计完成。
大连工作站在设计过程中必须经常沟通,比如机械设计时要给电气预留合理的走线位置及摆放端子箱、航插等空间,同时不仅要考虑到焊接时应用足够的空间,机器人的焊接姿态,还要考虑到焊接起点的位置等;大部分是用真空吸盘或者气动手爪进行捉取物件。
作为机器人的外部bai轴,由机器人控制器进行运行控制,这种控制方式变位机可以与机器人进行联动实现直线插补或圆弧插补运行,这种作为机器人外部轴的变位机相对来讲价格会很昂贵。






